-
On driving Eink displays
There are 2 different known ways to drive them that are widely known:– SPI epapers, can be driven with this popular interface that is supported from Arduino, to a wide variety of MCUs– Parallel epapers also called einks like the ones that are used in Kindle & another e-readers Let’s start with the most easy…
-
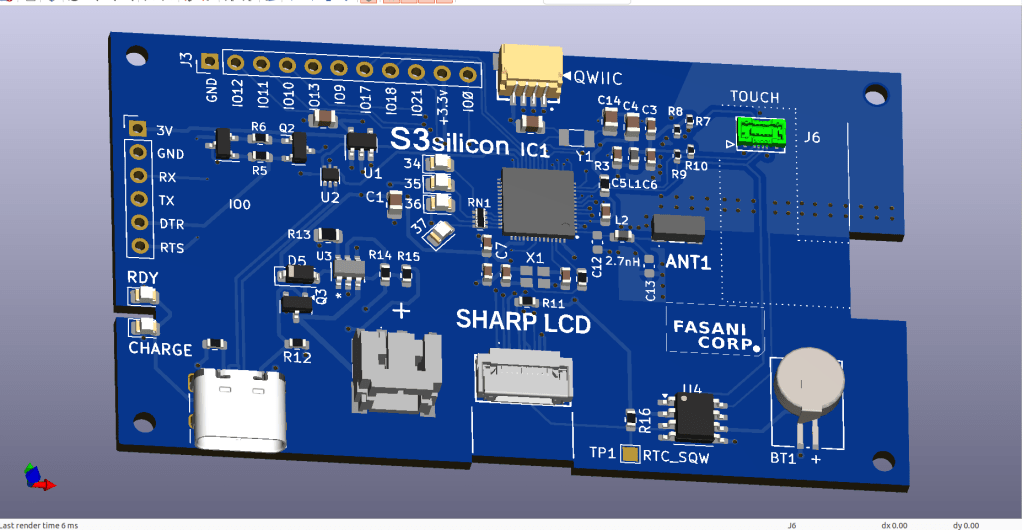
SHARP Controller LCD based on ESP32S3
The evolution of a simple C3 controller board into a full fledged ESP32S3 “Silicon only” small PCB that can control 400×240 LCDs and all their smaller models.First LCD controller I designed was a small clock size 128×128 pixels sharp LCD inspired by my friend Larry Bank who also likes this display technology. The evolution that…
-

Kindle paperwhite ESP32S3 controller
This is the resume of the previous entries where we custom modified epdiy version 7 into a custom PCB to control initially a Eink Kaleido display. In latest release we also modified slightly the Schematics to add a second touch model: TMA340 / TMA445 that is often found in the Kindle ED060XC3 also codenamed paperwhite…
-
Making an epdiy v7 Kaleido clone – Routing – part II
In Part I of this series we described how to take an existing KiCad open source repository, fork it, and start making updates to customize the PCB.This PCB will be ultimately sent to fabrication using our trusted service of JLCPCB using their PCB Assembly service. My mission in this PCB project is to make a…
-
Making a epdiy v7 Kaleido clone – part I
In this post we are going to clone the epdiy v7 Hardware repository and make a custom version to control a Eink Kaleido 6 inches display.The existing epdiy v7 can control this epaper already but we want to make a PCB clone specifically for this display, removing other connectors and adding additional ones for Touch…
-
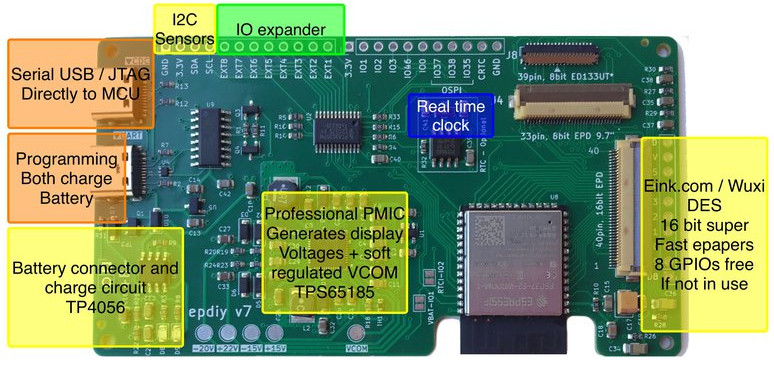
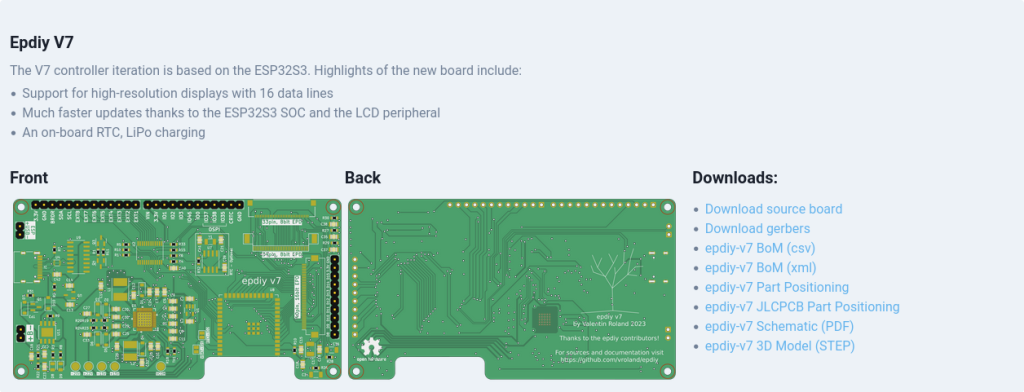
epdiy V7 S3 parallel epaper controller
I wanted to announce that the hardware for epdiy version 7, latest hardware for the project designed by Valentin Ronald, is ready to be tested. The original hardware you can find in the s3_lcd branch, this is my custom modified V7, that exposes 3 connectors: (Now already merged in main branch) I’ve been testing also…
-
New cases for the 9.7″ parallel displays and proposal for CLB Club
This might be a continuation from the Cinwrite DEXA epaper controller that we designed just after partnering with Freddie from Good-Display.comThe idea is to prepare an open source Firmware that is ready to be used with different examples and two target controllers: 1 – DEXA-C097 from Good-Display needs additionally my Cinwrite ESP32-S3 SPI controller Optionally…
-
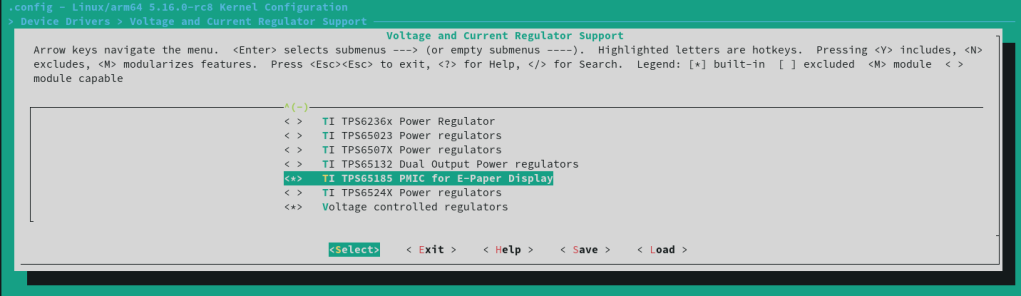
Compiling an ARM Linux kernel with EBC eink interface
First of all the essentials which are clearly explained here: Build your first Linux kernel and make sure you have at least 8 GB free disk space .Please be aware that building your own Linux kernel needs to be done with care and it’s a risky operation where you might need to wipe everything if…
-
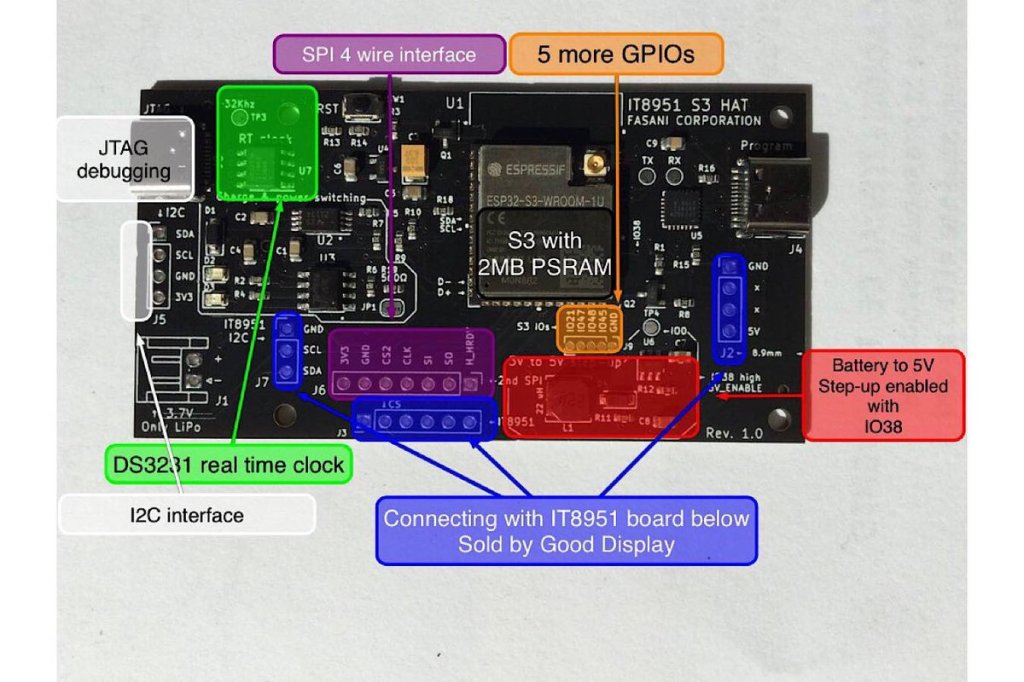
New Cinwrite SPI HAT for IT8951 parallel epaper controllers
At the moment only available in Tindie Fasani Corporation store this PCB mission is to provide: This Cinwrite PCB is open source Hardware that you can explore and even adapt to your needs. The price is 45 USD since I only made 5 and otherwise it will be impossible to cover the costs. But it…
-
Moved to Barcelona
Well it was hard, frustrating and a very tiring experience to say the least. But after finally signing a one year Contract for the apartment, and many “Nos” for other’s we’d liked, but we didn’t qualify since we do not have any spanish work…we are settling down nicely and already got high speed internet installed.Now…
-
Subscribe
Subscribed
Already have a WordPress.com account? Log in now.
